五轴联动机床的如何确定机床坐标系
数控机床的加工的目的是插补加工动作从一个点到另一个点,特别是对五轴联动的机床,确定这些点的坐标尤为重要,只有确定了这些点,才能够正确的执行加工,那么数控机床加工中的这些点是怎么确定的呢?是机床坐标系来确定这些点的坐标。
根据ISO841标准,数控机床坐标系用右手笛卡儿坐标系作为标准确定。数控车床平行于主轴方向即纵向为Z轴,垂直于主轴方向即横向为X轴,刀具远离工件方向为正向。
坐标轴的特点:
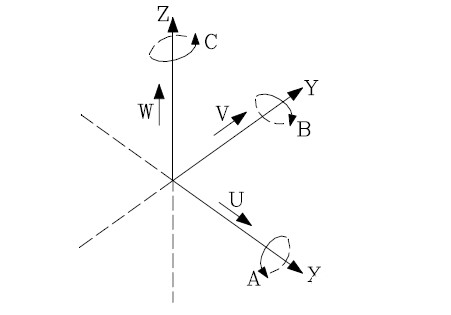
X 和 Y 主运动位于机床的主工作平面.
Z 平行于机床的主轴,垂直于主 XY 平面.
U, V, W 分别平行于 X,Y, Z 轴的轴.
A, B, C 绕 X,Y, Z 轴的旋转轴.
1、机床坐标系确定
1.1、机床相对运动的规定
工件相对静止,而刀具运动。
在机床上,始终认为工件静止,而刀具是运动的。这样编程人员在不考虑机床上工件与刀具具体运动的情况下,就可以依据零件图样,确定机床的加工过程。
1.2、机床坐标系的规定
标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定。
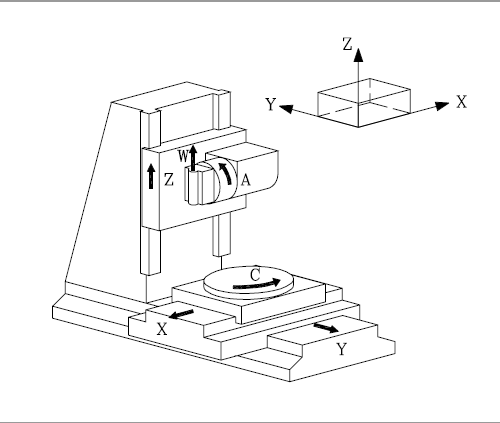
在数控机床上,机床的动作是由数控装置来控制的,为了确定数控机床上的成形运动和辅助运动,必须先确定机床上运动的位移和运动的方向,这就需要通过坐标系来实现,这个坐标系被称之为机床坐标系。
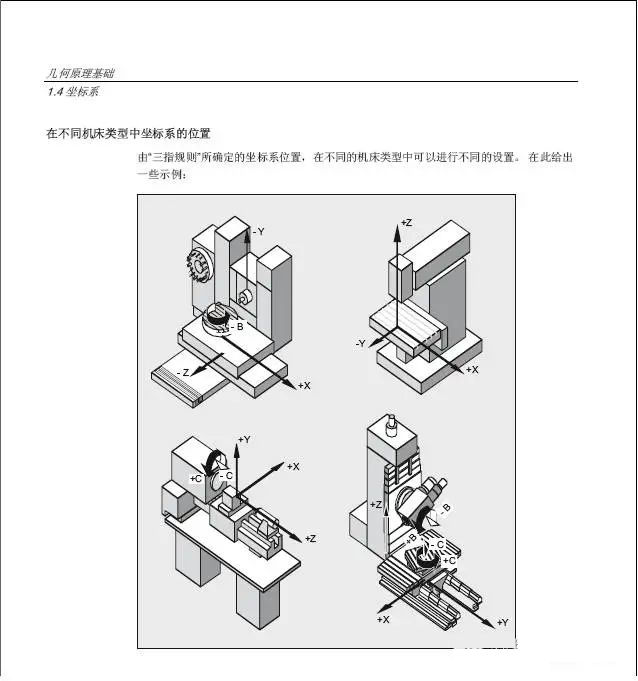
例如铣床上,有机床的纵向运动、横向运动以及垂向运动,如图所示。在数控加工中就应该用机床坐标系来描述相互关系。
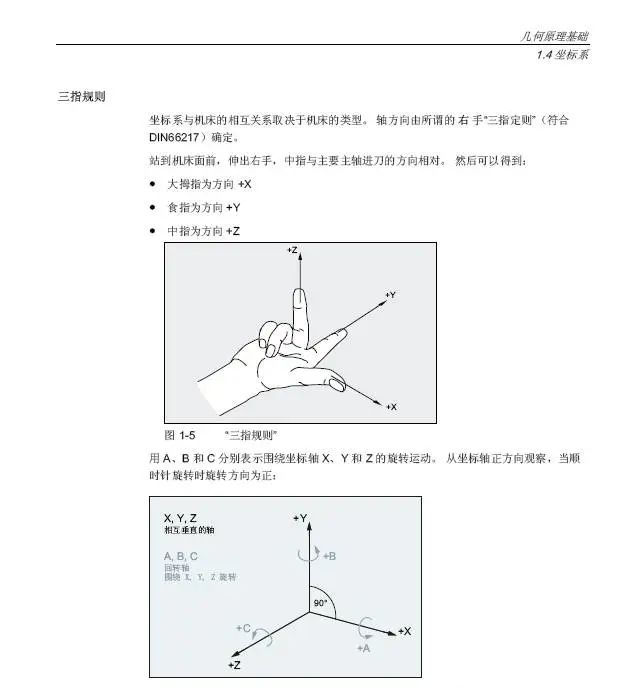
标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定:
1)伸出右手的大拇指、食指和中指,并互为90度。则大拇指代表X坐标,食指代表Y坐标,中指代表Z坐标。
2)大拇指的指向为X坐标的正方向,食指的指向为Y坐标的正方向,中指的指向为Z坐标的正方向。
3)围绕X、Y、Z坐标旋转的旋转坐标分别用A、B、C表示,根据右手螺旋定则,大拇指的指向为X、Y、Z坐标中任意一轴的正向,则其余四指的旋转方向即为旋转坐标A、B、C的正向。
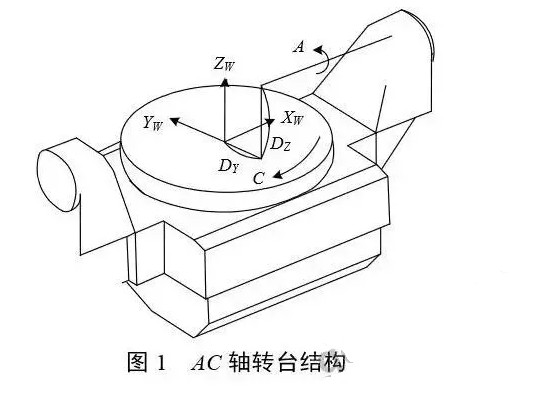
2、五轴联动机床的坐标系
五轴联动数控机床一般控制三个直线坐标轴和两个旋转坐标轴同时运动,使刀具和工件能够按照规定的运动轨迹进行切削加工,适合于加工叶片、螺旋桨、机翼等复杂型面的零件。两个旋转坐标轴可以是转台的回转及刀具的摆动,也可以是控制平转台和立转台的联动,或控制刀具作两个方向的摆动
五轴联动机床因为有了运动旋转头控制部件,所以机床坐标系的确定必须要和运动旋转部件的机械定义结合起来,五轴联动机床的坐标系要在笛卡尔坐标系的基础上结合运动旋转部件定义出机床坐标系。最重要的原则就是要以工件不动为基准来确定坐标系和轴的运动方向。
3、结语
五轴联动数控机床采用右手笛卡尔定则,再结合工件的是否运动的情况来确定机床的坐标系。